Kraftmessung (MotorTorque) mit der IRC5-Steuerung !
Für Greifer-Prozesse ist es vorteilhaft die Kraft am Werkzeug oder Werkstück zu kennen und zu kontrollieren. Übersteigt die Kraft ein bestimmtes Level, ist es notwendig, den Roboter definiert zu stoppen.
Aufgabe: Optimierung des Greifer-Prozesses zur Aufnahme eines Airbagnetzes von einem Stapel.
Problem: Je weniger Netze sich auf dem Stapel befinden, umso schwieriger wird das Aufnehmen eines einzelnen Netzes durch den Greifer, da die Nachgiebigkeit der Netze beim Abarbeiten des Stapels nachlässt. Dies führte später zu Schwierigkeiten beim Einlegen des Netzes in die Übergabevorrichtung.
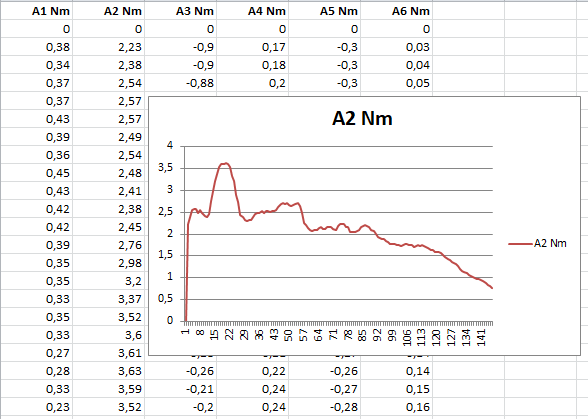
Lösung: Es wird eine Analyse der jeweiligen Kräfte in den Achsen 1 – 6 durchgeführt, um während der Suchfahrt die maßgebliche Achse zu bestimmen, siehe Grafik.
Für die Ermittlung der Greiferposition wird die Kraft (Motordrehmoment) in der Achse 2, während der Suchfahrt der Aufnahmeposition gemessen. Nun kann die Bewegung des Roboters bei überschreiten eines ermittelten Levels gestoppt werden, um den Nadelgreifer zu schließen.
Ergebnis: Durch das Stoppen der Greifer-Suchfahrt mit der Kraftmessung in Achse 2, ist die Position des Airbag-Netzes im Greifer immer identisch und die Nachgiebigkeit des Stapels spielt keine Rolle mehr.
Eine Dokumentation der jeweiligen Aufnahmesequenz kann über eine .csv Datei (Excel) erfolgen.
Fazit: Mit der Kraftmessung über den Motordrehmoment von A1 – A6 können die auftretenden Kräfte gemessen, darauf reagiert und dokumentiert werden. Zusatz-Achsen des Roboters wie Verfahrachsen und motorische Greiferachsen können ebenso überwacht werden.