Grundstellungsfahrt aus jeder Roboter-Stellung!
Während der Programmabarbeitung des Roboters kann es zu Situationen kommen, in denen das Roboterprogramm nicht fortgesetzt werden kann oder darf.
Zum Beispiel:
- Eine Peripheriestation ist ausgefallen (Störung)
- Es fehlen Freigabesignale
- Nach einem Not-Aus (Programmfortsetzung ist nicht möglich)
- Der Roboter ist mit Peripherieteilen kollidiert (Crash)
Kann ein auftretender Fehler nicht sofort behoben werden, muss das Roboterprogramm abgebrochen und der Roboter in die Homeposition gefahren werden. Danach wird der Fehler beseitigt und das Programm ab „MAIN“ neu gestartet.
Bietet das Programm keine automatische Rückfahrt, muss der Bediener den Roboter per Joystick verfahren. Ist er darin ungeübt, verlängert sich die Stillstandszeit der Anlage deutlich – die eigentliche Störung ist meist schnell behoben.
Viele Störungen können bereits über die integrierte Fehlerbehandlung gelöst werden. Wartet der Roboter z. B. zu lange auf ein Freigabesignal, kann er über eine Bedieneranforderung gezielt zur Homeposition fahren. Da beim Aufruf der Fehlerbehandlung die aktuelle Position bekannt ist, erfolgt die Fahrt kollisionsfrei.
Keine Lösung bietet die Fehlerbehandlung hingegen bei Not-Aus, Kollisionen, gestoppten Bewegungen oder einem Neustart des Programms. In diesen Fällen steht der Roboter meist nicht in einer definierten Position und das Programm muss durch „Start von MAIN“ neu gestartet werden.
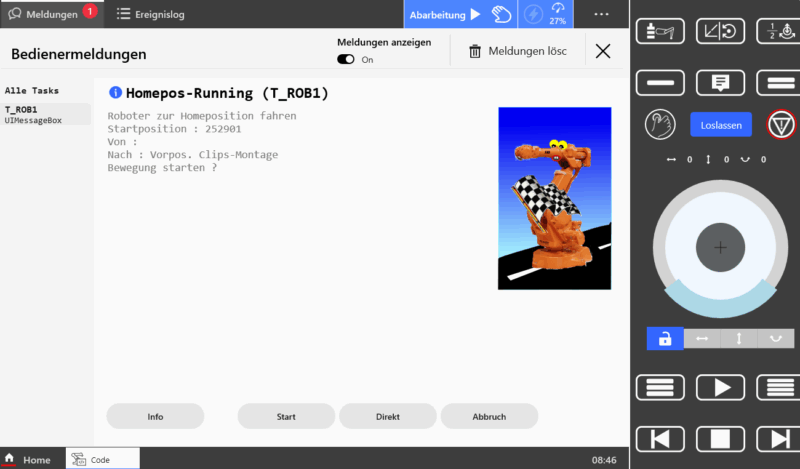
Damit der Roboter auch in diesen Fällen automatisch in die Homeposition fahren kann, kommt die Add-In Homepos-Running zum Einsatz.
Dieses Add-In bietet die Möglichkeit, nach einem Neustart des Roboterprogramms den Roboter aus jeder automatisch angefahrenen Position, unter Verwendung existierender Bewegungsroutinen, in die Homeposition zu fahren. Befinden sich Teile im Greifer, so können diese definiert an einer beliebigen Position abgelegt werden.
Wir übernehmen die komplette Inbetriebnahme !